Object Tracking based on Colors are tasks that are important and challenging such as video surveillance and vehicle navigation.
Image processing is a method of extracting some useful information by converting images into digital information by performing some operations on it.
Introduction Object Tracking based on Colors
Here we track objects in real-time and we apply some preprocessing steps on each video frame in order to track RGB-colored objects. To detect colored objects we subtract RGB color components from the grayscale image and remove undesirable noise from the image, then remove noise from the image we used a filter.
To detect objects accurately system removes all unwanted objects. Then we convert the grayscale image to a binary image. We used blob analysis methodology to detect the RGB-colored objects. Finally, System will display RGB colored Objects in rectangular boxes using the bounding box methodology. This system tracks all red, blue, and green colored objects and draws a bounding box around them. This system can be used for tracking various colored objects.
Installing Libraries:-
pyautogui: pip install pyautogui
HSV Value:-
- HSL and HSV are alternative representations of the RGB color model, designed in the 1970s by computer graphics researchers to more closely align with the way human vision perceives color-making attributes
- HSV Color Space. The HSV color space (hue, saturation, value) is often used by people who are selecting colors (e.g., of paints or inks) from a color wheel or palette, because it corresponds better to how people experience color than the RGB color space.
BGR to HSV:-
#dst = cv2.cvtColor(src, cv2.COLOR_BGR2HSV)
hsv = cv2.cvtColor(blurred, cv2.COLOR_BGR2HSV)
Minimum Enclosing Circle:-
#((x, y), radius) = cv2.minEnclosingCircle(countourArea)
((x, y), radius) = cv2.minEnclosingCircle(c)
Moments to find the center of the Area:-
Image moments help you to calculate some features like the center of mass of the object, the area of the object, etc.
#var = cv2.moments(contourArea)
M = cv2.moments(c)
center = (int(M["m10"] / M["m00"]), int(M["m01"] / M["m00"]))
Drawing Circle:-
# cv2.circle(src, (x,y), int(radius),colour,thickness)
cv2.circle(frame, (int(x), int(y)), int(radius), (0, 255, 255), 2)
#cv2.circle(frame, center, 5, (0, 0, 255), -1)
cv2.circle(frame, center, 5, (0, 0, 255), -1)
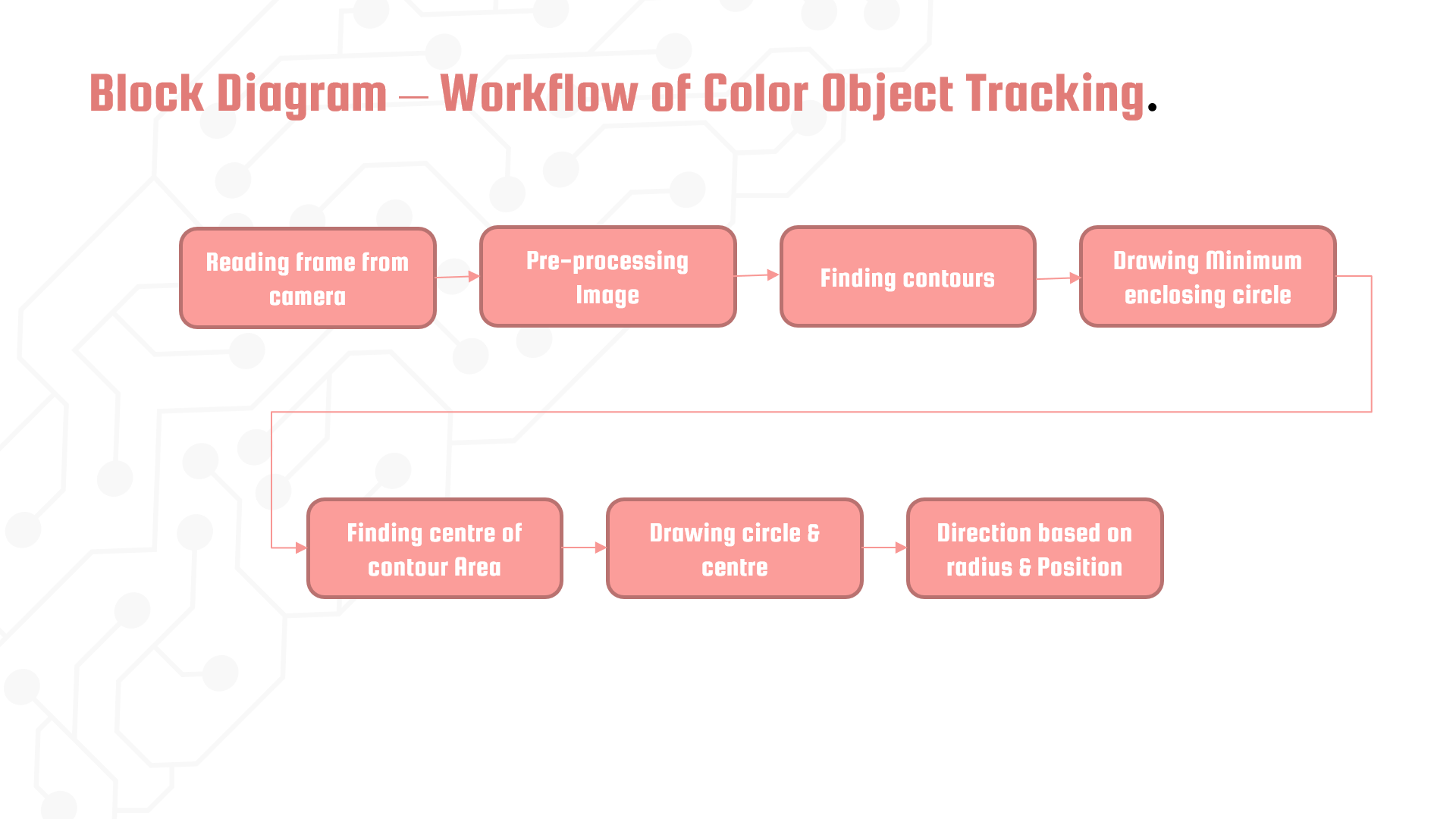
Block Diagram:-
Source Code:-
import imutils
import cv2
redLower = (157, 93, 203)
redUpper = (179, 255, 255)
camera=cv2.VideoCapture(1)
while True:
(grabbed, frame) = camera.read()
frame = imutils.resize(frame, width=600)
blurred = cv2.GaussianBlur(frame, (11, 11), 0)
hsv = cv2.cvtColor(blurred, cv2.COLOR_BGR2HSV)
mask = cv2.inRange(hsv, redLower, redUpper)
mask = cv2.erode(mask, None, iterations=2)
mask = cv2.dilate(mask, None, iterations=2)
cnts = cv2.findContours(mask.copy(), cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)[-2] center = None
if len(cnts) > 0:
c = max(cnts, key=cv2.contourArea)
((x, y), radius) = cv2.minEnclosingCircle(c)
M = cv2.moments(c)
center = (int(M["m10"] / M["m00"]), int(M["m01"] / M["m00"]))
if radius > 10:
cv2.circle(frame, (int(x), int(y)), int(radius),
(0, 255, 255), 2)
cv2.circle(frame, center, 5, (0, 0, 255), -1)
print(center,radius)
if radius > 250:
print("stop")
else:
if(center[0]<150):
print("Left")
elif(center[0]>450):
print("Right")
elif(radius<250):
print("Front")
else:
print("Stop")
cv2.imshow("Frame", frame)
key = cv2.waitKey(1) & 0xFF
if key == ord("q"):
break
camera.release()
cv2.destroyAllWindows()
Advantages
- The system tracks colored objects with good accuracy.
- Allows for tracking objects in live video.
Disadvantages
- Low Accuracy in low-resolution camera footage
- Low Accuracy in poor lighting conditions
Leave a Reply
You must be logged in to post a comment.